
A remotely operated underwater robot built by a team of Rice University engineering students pioneers a new way to control buoyancy via water-splitting fuel cells. The device, designed and constructed at the Oshman Engineering Design Kitchen over the course of a year-long senior design capstone class, offers a more power-efficient method of maintaining neutral buoyancy ⎯ a critical component in underwater operations.
The robot serves as proof-of-concept for the potential of fuel cell-based buoyancy control devices (BCDs) to reduce operating costs for remotely operated or autonomous underwater vehicles (AUVs) with potential applications ranging from environmental monitoring and oceanographic research to military and industrial tasks, providing a quieter, more energy-efficient alternative to conventional thruster-driven AUVs.
Team Bay-Max ⎯ Andrew Bare, Spencer Darwall, Noah Elzner, Rafe Neathery, Ethan Peck and Dan Zislis ⎯ based its project on an academic paper by researchers at Rice and the University of Houston showing that fuel cell-enabled depth control could reduce AUVs’ energy consumption by as much as 85% compared to traditional DC motor-based thruster designs. Fathi Ghorbel, a professor of mechanical engineering and bioengineering at Rice and the team’s sponsor, is a co-author on the study.
“The BayMax student team was excited to implement an innovative research idea based on electrolysis,” Ghorbel said. “The idea involves the transformation of water into hydrogen and oxygen gases to control AUVs’ buoyancy to mimic fish’ swim bladders. The research is part of a collaborative program between my lab, the lab of Professor Laura Schaefer at Rice and Professor Zheng Chen’s lab at the University of Houston.
“This collaborative research aims to develop tetherless continuum soft engines that utilize reversible proton exchange membrane fuel cells and water electrolyzers to drive volume-mass transformation. Through this design project, the BayMax team proved the efficacy of this technology in AUV interaction with the physical world.”
Ghorbel said this technology, which is highly energy-efficient and eliminates thrusting noise, has a wide range of applications such as AUVs, material intelligence, assistive wearable devices, adaptive and reprogrammable robotic garments and fabrics as machines.
“The cool thing about this for us is that it’s a technology that’s really cutting edge, it’s something that hasn’t been done before exactly the way we’re doing it,” Bare said. “We’re the first ones to implement this technology in a device with pitch roll and extensive controls, so we’re really excited about that.”

Neathery explained that “traditional underwater robots use thrusters or large pumps and propellers to change and hold their depth.”
“This can be problematic because these have high energy use and are heavy-weight and higher cost,” he said.
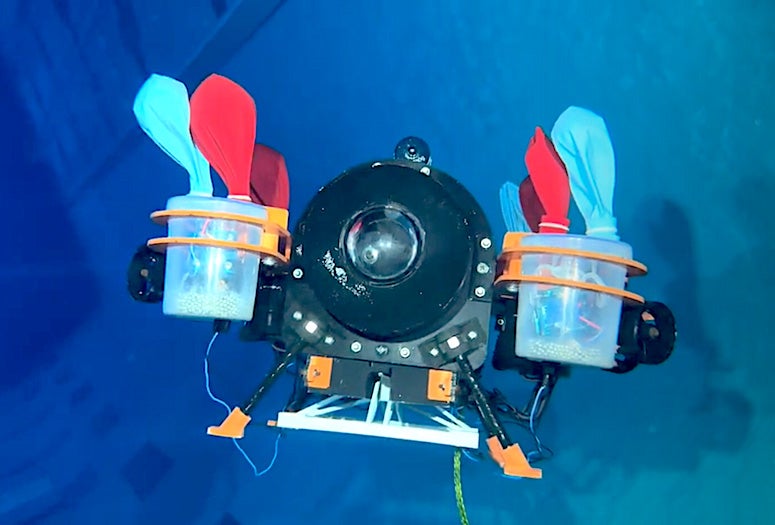
The BCDs incorporate reversible hydrogen fuel cells ⎯ which use electricity to turn water into hydrogen and oxygen and vice versa ⎯ with balloons, enabling the robot to smoothly adjust its depth with minimal energy use.
“When we apply voltage to the fuel cells, we can increase the buoyancy of our device by having distilled water push through the fuel cell substrate and ionized into the two gases,” Zislis said. “When we want to conserve or regain energy and diminish the buoyancy of the device, we send the voltage in the opposite direction, which reverses the process.”
Because hydrogen and oxygen are naturally drawn to react and form water, reverse electrolysis generates energy that the device can harness. The robot also incorporates several different sensors that collect information about system vitals and, more importantly, about the position and orientation of the device underwater. This information is fed to a dashboard that displays core system information, real-time graphs of the robot’s location, a simulation of its relative orientation and a top-down view of the BCDs activation state.
“The dashboard was my primary responsibility,” Elzner said. “This setup lets us monitor everything from the robot’s depth to its orientation in real time.”
The robot combines an automatic stabilizing algorithm and depth control with manual control of the vehicle.
“We incorporated an actual video game joystick,” Darwall said, adding that the project required him to “take a deep dive into control theory and learn new software.”

“I think in addition to having a really rewarding output, it was a great learning experience,” he said.
The project won second place in the Willy Revolution Award for Outstanding Innovation at the annual Huff OEDK Engineering Design Showcase, which was held at the Ion April 11.
“Having spent a year on it now and putting so much time into it, getting to see the result of all that work come together is really rewarding,” Peck said.
The team coalesced over a shared interest in vehicle engineering or robotics and a desire to deploy their skills doing something outside their comfort zone.
“Most of us knew each other from classes and/or clubs such as Rice Eclipse, the university’s rocketry club,” Zislis said. “We were inspired to work together on such an ambitious and amazing project because we knew we would have great team chemistry, which would allow us to both support and challenge one another.”
Managing system interdependencies was one of the big challenges the team faced.
“With a project like this, integration was critical,” Zislis said. “Another takeaway for me is the importance of determining a clear scope for any given project. With this robot, we could have focused on a lot of different things. For instance, we could have worked on improving fuel cell efficiency or making a robotic arm. Instead, we chose to keep these other elements simple so as not to divert focus away from the main part, which is the buoyancy control device. This kind of decision-making process is not just part of good engineering, but it’s relevant with everything in life.”
The team was mentored by Ghorbel, David Trevas, a Rice mechanical engineering lecturer, and Gary Woods, professor in the practice in electrical and computer engineering.
- Image downloads:
-
https://news-network.rice.edu/news/files/2024/04/240409_BA_Fitlow_026-dc307ccff4320e77.jpg
CAPTION: Noah Elzner (from left), Dan Zislis, Ethan Peck, Spencer Darwall, Andrew Bare and Rafe Neathery. (Photo by Jeff Fitlow/Rice University)
https://news-network.rice.edu/news/files/2024/04/240409_BA_Fitlow_024-9df380227d2165db.jpg
CAPTION: Andrew Bare (Photo by Jeff Fitlow/Rice University)
https://news-network.rice.edu/news/files/2024/04/240409_BA_Fitlow_006-8d20c0554d33a2f2.jpg
CAPTION: Rafe Neathery (Photo by Jeff Fitlow/Rice University)
{kind=link}
{kind=link}
{kind=link}